| SECCIÓN | TEMA | PÁGINA |
| Capítulo 1. |
Introducción a los sistemas de control y su relación con los sistemas de información. |
1. |
| Capítulo 2. |
Componentes básicos de los sistemas de control. |
19. |
| Capítulo 3. |
Modelos matemáticos para sistemas de lazo abierto y cerrados. |
49. |
| Capítulo 4. |
La transformada de Laplace aplicada a los sistemas de control. |
69. |
| Capítulo 5. |
Modelos de sistemas de control mediante bloques funcionales. |
83. |
| Capítulo 6. |
Análisis de la estabilidad y del error en estado estable en los sistemas de control. |
107. |
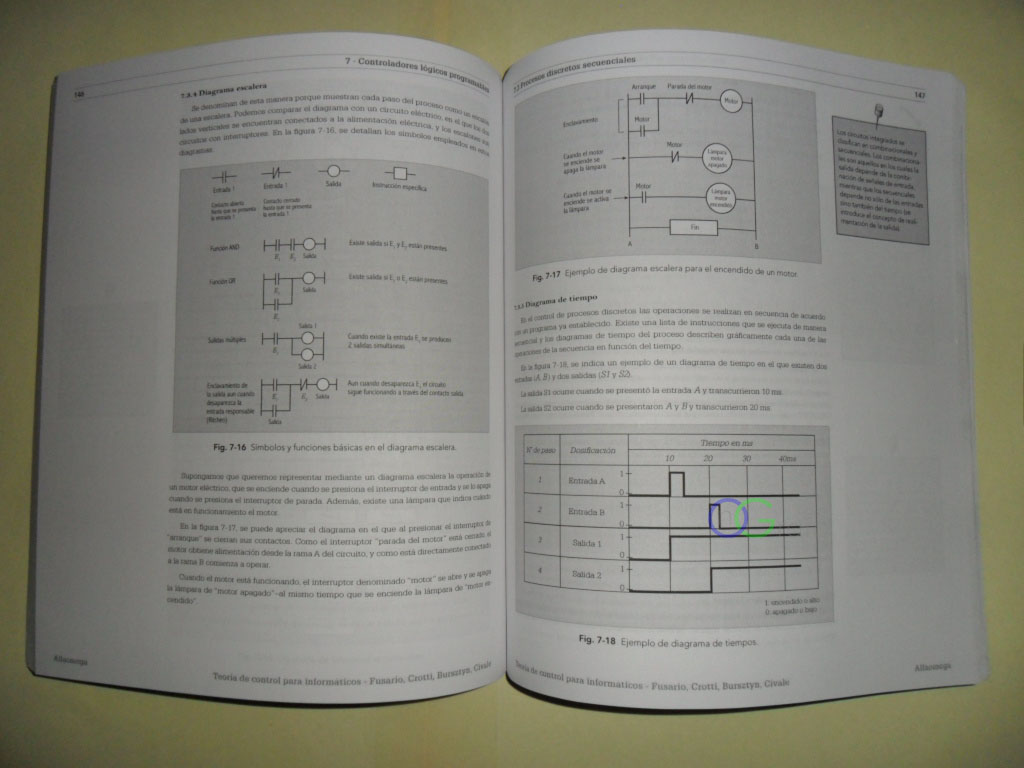
| Capítulo 7. |
Controladores lógicos programables. |
135. |
| Capítulo 8. |
Transformada Z aplicada a los sistemas de control. |
177. |
| Capítulo 9. |
Ejemplos de aplicación de sistemas de control. |
199. |
|
APÉNDICES. |
|
| A. |
Buses de campo. |
227. |
| B. |
Introducción y uso básico de Matlab. |
237. |
| C. |
Análisis de datos en forma matricial. Usos de SIMULINK. |
265. |
|
Glosario. |
285. |
|
Índice analítico. |
289. |